10月27日至10月30日,第十八届“挑战杯”全国大学生课外学术科技作品竞赛终审决赛在贵州大学举行。在本届赛事中,我校《基于拓扑变换与短程线寻迹算法的FAST反射面板索网形态调节》《“零耗制冷”——气化冷量回收式成冰系统》2件作品分别获得主体赛国家级二等奖、三等奖,“红色专项”《“颂精神,齐宣讲,映初心”党的二十大理论宣讲普及》《黔征行》2件作品获得国赛三等奖,《基于曲面自适应的爬壁机器人平台》被评为“黑科技”全国星系级(特等奖)作品,《基于SLAM技术及数字孪生的空地协同式全地形探路机器人及动态可视化应用平台》等6件作品分别获“黑科技”赛道国赛一等奖1项,二等奖5项,充分展示出红柳学子的科创能力和青春风采,取得近年来在“挑战杯”赛事中的国家级奖励新突破,获奖项目总数位列全省省属高校首位。

《基于曲面自适应的爬壁机器人平台》被评为“黑科技”全国星系级(特等奖)作品
作品路演
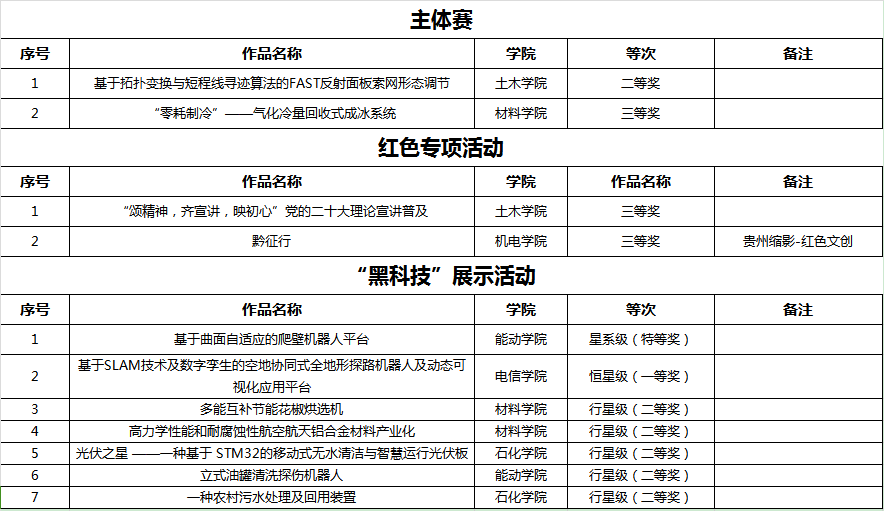
获奖项目名单
“挑战杯”全国大学生课外学术科技作品竞赛以“崇尚科学、追求真知、勤奋学习、锐意创新、迎接挑战”为宗旨,被誉为当代大学生科技创新的“奥林匹克”盛会。近年来,学校充分发挥“挑战杯”竞赛等创新创业实践平台作用,由校团委牵头组织,教务处、创新创业学院、研究生院等相关部门和各学院全力支持,从项目选题、研究设计、项目方案、答辩展示等各方面加强组织保障,着力提升参赛团队的竞赛水平,培养学生的开拓创新精神。本届赛事中,经过学院选拔和两轮校内评审,遴选出31件项目参加主体赛省赛,在国赛中获得二等奖1项、三等奖3项,“黑科技”赛道获得特等奖1项、一等奖1项、二等奖5项。
主体赛优秀作品展示:
二等奖作品:基于拓扑变换与短程线寻迹算法的FAST反射面板索网形态调节
团队成员:刘明哲 梁杰 王培宇
指导教师:王秀丽 汪训洋
从数理方程入手,对标“中国天眼FAST”(500米口径球面射电望远镜)大尺度反射面柔性索网精密调节技术这一重大战略科研难题,利用拓扑相变、短程线搜索算法分别解决常规观测中的大尺度网格复杂度与调节观测时滞性问题;利用GH、ABAQUS等软件建立信息模型,对主动调节过程进行全参数化模态仿真,使馈源接受率达至最优。实现了对任意角度下观测星体轨道的自动跟瞄与“索网两系”壳体结构一站式变位预研与调控策略仿真解构。团队从理论上针对FAST特殊调节形式建立了一套计算机主动轮廓搜索算法,极大减轻常规调节方式与理论计算的繁冗,为多波束性能提升、视场覆盖效果优化等方面提供必要技术支撑。
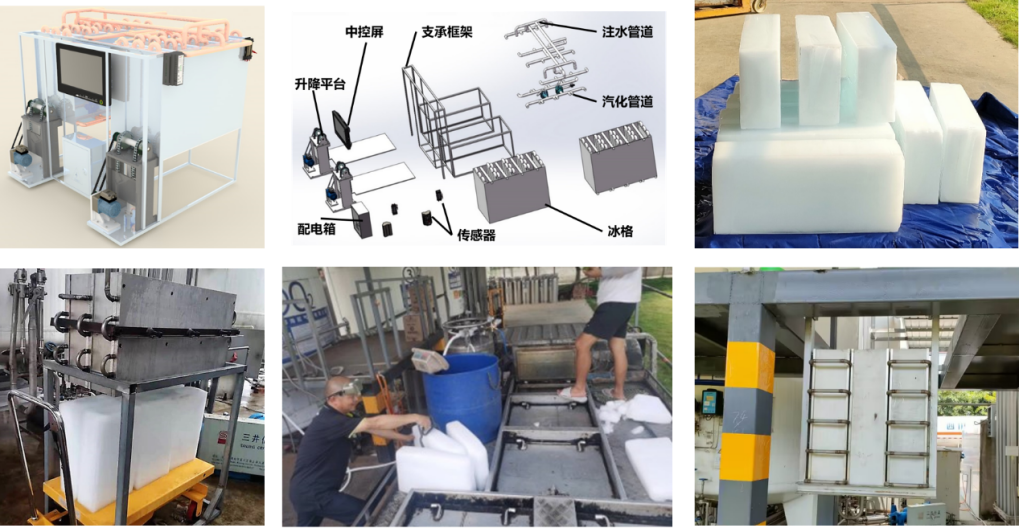
三等奖作品:“零耗制冷”——气化冷量回收式成冰系统
团队成员:付义涵 张红霞 孙晓梅 王潇华 邓陶 余鹏飞
指导教师:张东 徐阳
目前气体充装站大规模使用的汽化器为通风空浴式,它在汽化气体的过程中会吸收热量,汽化器表面会快速结冰,不但白白浪费了大量能量,而且降低了汽化效率。我团队针对以上现象,参考电动制冰机和传统汽化器的结构,设计出了一款回收液氧汽化吸热产生的冷量,进行制冰的液氧汽化制冰机,实现了能量的高效利用,同时缓解了传统汽化器因表面结冰而造成汽化效率降低的问题。该汽化器采用液氧管道嵌入冰格以及左右单元交替工作的设计,实现了连续汽化并高效制冰的目的。
“黑科技”赛道作品展示:
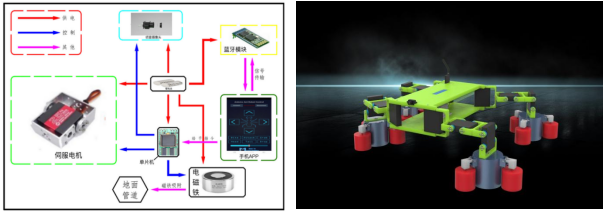
星系级(特等奖)作品:基于曲面自适应的爬壁机器人平台
团队成员:周兴祺 柳政熙 夏昕阳 龙令涛 申双权 闵宇乔 孙昂
指导教师:王晓晖 史有程 吴江波
项目针对现有爬壁机器人普遍存在曲面适应率欠佳、运动灵活性不强,无法实现复杂变曲率工作表面的全方位灵活运动与障碍跨越以及机器人在工作中会对装置表面状态造成损伤等问题,提出了一种曲面自适应爬壁机器人。其吸附模块采用电磁铁和永磁铁相结合的新型足式结构,大幅提高其在表面的稳定性;运动模块采用多个扭矩大、精度高、速度快的舵机相结合,包括横向、纵向和旋转等,实现了全方位的灵活移动,可以为爬壁机器人的应用提供更广阔的可能性。
本届大赛由共青团中央、中国科协、教育部、中国社科院、全国学联和贵州省人民政府共同主办、贵州大学承办,赛事通过搭建主体赛、“揭榜挂帅”专项赛、红色专项活动、“黑科技”展示活动有机组成“1+1+2”整体架构,共吸引全国2000多所高校、40余万作品、250多万学生参赛。经过校赛选拔、省赛选拔、国赛预审等环节,最终344所内地高校的690件作品、9所港澳地区高校的23件作品入围终审决赛。
下一步,校团委将继续秉承“以赛促学、以赛促创”的理念,继续加强竞赛育人工作,促进第二课堂与第一课堂深度融合,进一步培养青年学子创新和实践能力,引导广大青年学子心怀报国之志,勇担时代重任,奋力逐梦科技创新,以实际行动为中国式现代化建设的伟大新征程贡献青春力量。(撰稿:刘沂蒙,审核:李大鹏)
